之前我们讲到了elf文件,通过解析elf文件,我们知道了对于关键文件需要保护哪些内容,这里主要针对是关键性文件的完整性校验的了解。
一、完整性计算
根据防破解之-elf文件格式我们知道了数据来源,为了实现关键文件防篡改,我们需要对这些内容进行完整性计算,针对此,我们应该满足下面三点:
- 数据正向计算容易,逆向计算几乎不可能
- 数据计算结果长度固定
- 数据计算不易碰撞
根据上面的要求,结合当前已知的数据结构,我们可以选择hash,并且是单向hash。而常用的单向hash有哪些呢,如下:
- md5
- sha
- sm3
对于此,我们可以如下假设,先定义一个数据源来自于.text
objcopy --dump-section .text=text.bin libhelloworld.so
这里我们提取了text.bin,我们先使用md5进行提取摘要
# md5sum text.bin 2d662e596919c294d7e3f274d75549b6 text.bin
使用sha256进行提取摘要
# openssl dgst -sha256 text.bin SHA256(text.bin)= 6aaf37f9ef03aa1f06dab8083784a4b50acca524f9cf7476acc52bd23dc118f2
使用sm3进行提取摘要 通过openssl
# openssl dgst -sm3 text.bin SM3(text.bin)= d0e43ea849949decc4cf8deb557f4cb46f0f560563dc2f0a63f6cbfa5e27de18
至此,基于三种算法的完整性计算方案已经演示
二、md5的碰撞
我们可以知道,md5默认是256bit的摘要提取,但是根据当前的技术状态,md5是能够存在碰撞的,虽然是2^128的概率,如下是碰撞例子:
数据1:
STR1=d131dd02c5e6eec4693d9a0698aff95c2fcab58712467eab4004583eb8fb7f8955ad340609f4b30283e488832571415a085125e8f7cdc99fd91dbdf280373c5bd8823e3156348f5bae6dacd436c919c6dd53e2b487da03fd02396306d248cda0e99f33420f577ee8ce54b67080a80d1ec69821bcb6a8839396f9652b6ff72a70
数据2
STR2=d131dd02c5e6eec4693d9a0698aff95c2fcab50712467eab4004583eb8fb7f8955ad340609f4b30283e4888325f1415a085125e8f7cdc99fd91dbd7280373c5bd8823e3156348f5bae6dacd436c919c6dd53e23487da03fd02396306d248cda0e99f33420f577ee8ce54b67080280d1ec69821bcb6a8839396f965ab6ff72a70
此时我们做一下文本转换
echo $STR1 | xxd -r -p > str1 echo $STR2 | xxd -r -p > str2
此时我们对比一下即可
# md5sum str1 str2 79054025255fb1a26e4bc422aef54eb4 str1 79054025255fb1a26e4bc422aef54eb4 str2
可以看到,上面STR1和STR2进行碰撞了
我们通过hexdump进行转换16进制如下:
hexdump -C str1 > 1 hexdump -C str2 > 2
此时我们对比即可两个str的不同

参考:https://www.mscs.dal.ca/~selinger/md5collision/
故,根据此信息,md5存在碰撞问题,我们可以选择sha或sm3,对于sha,我们通常情况下选择更通用的sha256。
三、最终选择
根据上面我们可以知道,如果我们不在意md5的碰撞问题,那么我们可以选择md5,如果比较在意碰撞,那么我们可以选择更通用的sha256算法
当然sha还提供了其他的信息摘要算法,如下:
# openssl help Message Digest commands (see the `dgst' command for more details) blake2b512 blake2s256 gost md4 md5 rmd160 sha1 sha224 sha256 sha3-224 sha3-256 sha3-384 sha3-512 sha384 sha512 sha512-224 sha512-256 shake128 shake256 sm3
这些摘要算法我就不一一演示,对于当前方案,我们只需要知道选择了sha256。后续如果有需求使用sm3,会在重构的时候使用sm3。
对于sha256的原理,我也不了解,需要时间沉淀,这里提供文档,点击即可阅读,有兴趣的可以了解一下
关于演示,这里贴出一个网页,也可以了解一下:
为了让系统的二进制文件避免被破解,我们先需要针对elf文件进行了解,本文以防破解为目的,来简单了解一下elf的组成,如果需要详细了解的,建议阅读《elf.pdf》和《elf-64-gen.pdf》,文件点击即可阅读。理解此文章需要一点elf知识,建议可以先搜索引擎简单了解一下。
一、ELF的结构
这里以网上的图片为例,ELF结构如下:
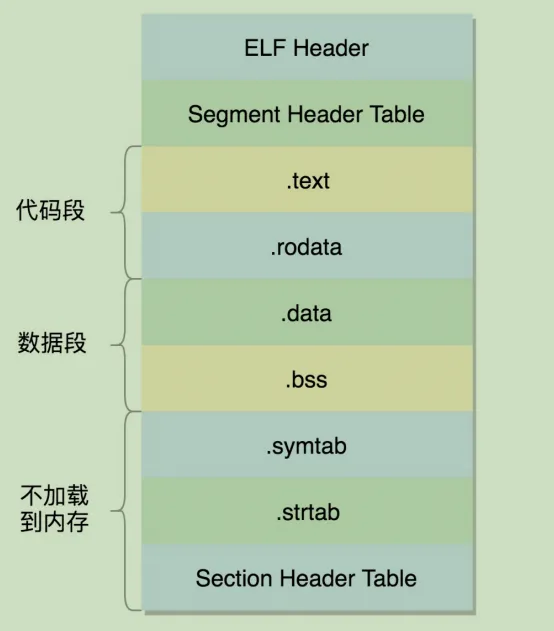 可以发现,这里列举了必要的ELF内容,这里解释如下:
可以发现,这里列举了必要的ELF内容,这里解释如下:
ELF Header: ELF的头结构 .text: 程序的代码段 .rodata: 程序的只读数据区 .data: 程序的已初始化的数据区 .bss: 程序的未初始化数据(初始化为0算未初始化) .symtab: 链接符号表 .strtab: 字符串表 Section Header:节的头表
而实际上,我以一个helloworld.c的so编译一个libhelloworld.so为例,查看一下elf的结构:
抛开elf头和节头,剩下的段如下:
# readelf -S libhelloworld.so 节头: [号] 名称 类型 地址 偏移量 大小 全体大小 旗标 链接 信息 对齐 [ 0] NULL 0000000000000000 00000000 0000000000000000 0000000000000000 0 0 0 [ 1] .note.gnu.build-i NOTE 00000000000001c8 000001c8 0000000000000024 0000000000000000 A 0 0 4 [ 2] .gnu.hash GNU_HASH 00000000000001f0 000001f0 0000000000000024 0000000000000000 A 3 0 8 [ 3] .dynsym DYNSYM 0000000000000218 00000218 00000000000000d8 0000000000000018 A 4 3 8 [ 4] .dynstr STRTAB 00000000000002f0 000002f0 000000000000007b 0000000000000000 A 0 0 1 [ 5] .gnu.version VERSYM 000000000000036c 0000036c 0000000000000012 0000000000000002 A 3 0 2 [ 6] .gnu.version_r VERNEED 0000000000000380 00000380 0000000000000020 0000000000000000 A 4 1 8 [ 7] .rela.dyn RELA 00000000000003a0 000003a0 00000000000000a8 0000000000000018 A 3 0 8 [ 8] .rela.plt RELA 0000000000000448 00000448 0000000000000048 0000000000000018 AI 3 19 8 [ 9] .init PROGBITS 0000000000000490 00000490 0000000000000014 0000000000000000 AX 0 0 4 [10] .plt PROGBITS 00000000000004b0 000004b0 0000000000000050 0000000000000010 AX 0 0 16 [11] .text PROGBITS 0000000000000500 00000500 00000000000000fc 0000000000000000 AX 0 0 8 [12] .fini PROGBITS 00000000000005fc 000005fc 0000000000000010 0000000000000000 AX 0 0 4 [13] .eh_frame_hdr PROGBITS 000000000000060c 0000060c 0000000000000034 0000000000000000 A 0 0 4 [14] .eh_frame PROGBITS 0000000000000640 00000640 000000000000009c 0000000000000000 A 0 0 8 [15] .init_array INIT_ARRAY 0000000000010df0 00000df0 0000000000000008 0000000000000008 WA 0 0 8 [16] .fini_array FINI_ARRAY 0000000000010df8 00000df8 0000000000000008 0000000000000008 WA 0 0 8 [17] .dynamic DYNAMIC 0000000000010e00 00000e00 00000000000001c0 0000000000000010 WA 4 0 8 [18] .got PROGBITS 0000000000010fc0 00000fc0 0000000000000028 0000000000000008 WA 0 0 8 [19] .got.plt PROGBITS 0000000000010fe8 00000fe8 0000000000000030 0000000000000008 WA 0 0 8 [20] .data PROGBITS 0000000000011018 00001018 0000000000000016 0000000000000000 WA 0 0 8 [21] .bss NOBITS 0000000000011030 0000102e 0000000000000008 0000000000000000 WA 0 0 4 [22] .comment PROGBITS 0000000000000000 0000102e 000000000000002a 0000000000000001 MS 0 0 1 [23] .symtab SYMTAB 0000000000000000 00001058 0000000000000690 0000000000000018 24 64 8 [24] .strtab STRTAB 0000000000000000 000016e8 0000000000000236 0000000000000000 0 0 1 [25] .shstrtab STRTAB 0000000000000000 0000191e 00000000000000e5 0000000000000000 0 0 1
其他的节的解释,可以查看官方文档。这里不做解释了。
二、关注的节
我们带着问题来找答案:目前需要对一个elf文件进行保护,那我们保护什么呢?答案应该如下:
- 代码的实现
- 程序的数据
我们不需要关心的是
- 无需加载到内存中的节
- 参与动态链接的节
- 参与异常处理的节
- 特殊或用于标识的节
这里我们可以知道,下面节是我们无需关心的:
.rela.dyn .rela.plt .plt .got .got.plt .eh_frame_hdr .eh_frame .shstrtab .*gnu*
需要关心的是:
.init .init_array .fini .fini_array .text .rodata .data .bss
但是这里我们注意的是32位和64位的.init* 和.fini* 目前没有由程序参与,故可以排除掉,则我们关心如下节即可:
.text .rodata .data .bss
2.1 .text
我们知道.text是二进制的代码段,我们可以通过命令查看如下,以libhelloworld.so为例
# objdump -d -j .text libhelloworld.so libhelloworld.so: 文件格式 elf64-littleaarch64 Disassembly of section .text: 0000000000000500 <hello_world@@Base-0xd4>: 500: 90000080 adrp x0, 10000 <hello_world@@Base+0xfa2c> 504: f947ec00 ldr x0, [x0, #4056] 508: b4000040 cbz x0, 510 <puts@plt+0x20> 50c: 17fffff5 b 4e0 <__gmon_start__@plt> 510: d65f03c0 ret 514: d503201f nop 518: b0000080 adrp x0, 11000 <hello_world@@Base+0x10a2c> 51c: 9100c000 add x0, x0, #0x30 520: b0000081 adrp x1, 11000 <hello_world@@Base+0x10a2c> 524: 9100c021 add x1, x1, #0x30 528: eb00003f cmp x1, x0 52c: 540000c0 b.eq 544 <puts@plt+0x54> // b.none 530: 90000081 adrp x1, 10000 <hello_world@@Base+0xfa2c> 534: f947e421 ldr x1, [x1, #4040] 538: b4000061 cbz x1, 544 <puts@plt+0x54> 53c: aa0103f0 mov x16, x1 540: d61f0200 br x16 544: d65f03c0 ret 548: b0000080 adrp x0, 11000 <hello_world@@Base+0x10a2c> 54c: 9100c000 add x0, x0, #0x30 550: b0000081 adrp x1, 11000 <hello_world@@Base+0x10a2c> 554: 9100c021 add x1, x1, #0x30 558: cb000021 sub x1, x1, x0 55c: d37ffc22 lsr x2, x1, #63 560: 8b810c41 add x1, x2, x1, asr #3 564: eb8107ff cmp xzr, x1, asr #1 568: 9341fc21 asr x1, x1, #1 56c: 540000c0 b.eq 584 <puts@plt+0x94> // b.none 570: 90000082 adrp x2, 10000 <hello_world@@Base+0xfa2c> 574: f947f042 ldr x2, [x2, #4064] 578: b4000062 cbz x2, 584 <puts@plt+0x94> 57c: aa0203f0 mov x16, x2 580: d61f0200 br x16 584: d65f03c0 ret 588: a9be7bfd stp x29, x30, [sp, #-32]! 58c: 910003fd mov x29, sp 590: f9000bf3 str x19, [sp, #16] 594: b0000093 adrp x19, 11000 <hello_world@@Base+0x10a2c> 598: 3940c260 ldrb w0, [x19, #48] 59c: 35000140 cbnz w0, 5c4 <puts@plt+0xd4> 5a0: 90000080 adrp x0, 10000 <hello_world@@Base+0xfa2c> 5a4: f947e800 ldr x0, [x0, #4048] 5a8: b4000080 cbz x0, 5b8 <puts@plt+0xc8> 5ac: b0000080 adrp x0, 11000 <hello_world@@Base+0x10a2c> 5b0: f9400c00 ldr x0, [x0, #24] 5b4: 97ffffc7 bl 4d0 <__cxa_finalize@plt> 5b8: 97ffffd8 bl 518 <puts@plt+0x28> 5bc: 52800020 mov w0, #0x1 // #1 5c0: 3900c260 strb w0, [x19, #48] 5c4: f9400bf3 ldr x19, [sp, #16] 5c8: a8c27bfd ldp x29, x30, [sp], #32 5cc: d65f03c0 ret 5d0: 17ffffde b 548 <puts@plt+0x58> 00000000000005d4 <hello_world@@Base>: 5d4: a9be7bfd stp x29, x30, [sp, #-32]! 5d8: 910003fd mov x29, sp 5dc: 52800020 mov w0, #0x1 // #1 5e0: b9001fe0 str w0, [sp, #28] 5e4: b0000080 adrp x0, 11000 <hello_world@@Base+0x10a2c> 5e8: 91008000 add x0, x0, #0x20 5ec: 97ffffc1 bl 4f0 <puts@plt> 5f0: d503201f nop 5f4: a8c27bfd ldp x29, x30, [sp], #32 5f8: d65f03c0 ret
2.2 .data
我们知道.data是二进制的已初始化数据段,我们可以通过命令查看如下
# readelf -p .data libhelloworld.so String dump of section '.data': [ 8] Hello, World!
2.3 rodata
我们知道.rodata是二进制的只读数据段,我们需要添加一个变量让其存放在rodata,如下:
const char k[]="Hello, Kylin!";
此时我们查看如下
# readelf -p .rodata libhelloworld.so String dump of section '.rodata': [ 0] Hello, Kylin!
2.4 .bss
我们知道.bss是二进制的未初始化数据段,我们需要添加一个变量让其存放在.bss,如下:
char bss[64] = "";
此时我们查看如下
# objdump -d -j .bss libhelloworld.so libhelloworld.so: 文件格式 elf64-littleaarch64 Disassembly of section .bss: 0000000000011038 <completed.9189>: ... 0000000000011040 <bss>: ...
三、如何保护
我们抓住了elf的重点,就是
可加载文件的在运行时加载的text/data/rodata/bss段 如果我们下载hexedit工具,我们只需要对libhelloworld.so进行修改,就能左右代码的执行,数据的信息等等。为了简单易懂,我以修改rodata为例示例修改elf文件。
3.1 制造篡改
假设程序如下:
#include <stdio.h> void hello_world() { const char k[]="Hello, Kylin!"; printf("%s\n", k); } # LD_LIBRARY_PATH=./ ./test-helloworld Hello, Kylin!
已知rodata的内容是"Hello, Kylin!",我需要通过hexedit修改为"Hello, World!"如下:
hexedit libhelloworld.so
我们知道Hello, World!和Hello, Kylin!的二进制如下
# echo "Hello, World!" | xxd -g 1 00000000: 48 65 6c 6c 6f 2c 20 57 6f 72 6c 64 21 0a Hello, World!. # echo "Hello, Kylin!" | xxd -g 1 00000000: 48 65 6c 6c 6f 2c 20 4b 79 6c 69 6e 21 0a Hello, Kylin!.
这里我们打算把Kylin更换成World,我们使用hexedit编辑即可
hexedit libhelloworld.so
这里我们将4b 79 6c 69 6e修改成57 6f 72 6c 64即可。此时我们再运行程序
# LD_LIBRARY_PATH=./ ./test-helloworld Hello, World!
3.2 开展保护
为了针对elf程序的修改行为,我们计划是新增一个名字为.encrypt的加密节,里面存放上述关键节的hash加密。关于hash的选择后面文章会提,这里提供添加节的方法如下:
objcopy --add-section .encrypt=sha256_text.bin libhelloworld.so libhelloworld_en.so
此时,这个新的so会多出现一个节,如下:
readelf -S libhelloworld_en.so [23] .encrypt PROGBITS 0000000000000000 00001058 0000000000000100 0000000000000000 0 0 1
至此,我们根据elf的基本组成原理,为了安全性考量,新增了一个由程序自定义行为(PROGBITS)的节.encrypt来实现对核心文件防篡改的基本需求
为了开发调试方便,这里基于apache2搭建了一个adv的文件上传下载服务器站点,地址是172.25.130.31。本文总结搭建方法,和操作步骤,从而真正意义上实现文件中转站的基本功能
一、为什么要文件中转站
鉴于我们的开发方式是通过服务器上的chroot环境进行开发,而我们的烧录通常是在linux/windows上通过烧录工具的方式,这就导致了我们需要在chroot环境中通过scp的方式将文件复制过来,假设我主机的ip地址是124,那么我需要如下:
scp boot.img root@172.25.80.124:/home/kylin
如果我们的目标ip经常发生改变,那么这个124会经常修改,这就导致我们传输文件比较繁琐。
我们知道,解决任何问题,都可以添加一个中间者,这样,发送者只需要关心发给中间者即可,接受者只需要从中间者接受。
于是文件中转站的角色便诞生了。
二、搭建apache服务器
安装apache2
apt install apache2
使能dav fs
a2enmod dav a2enmod dav_fs
修改apache2配置
vim /etc/apache2/sites-available/000-default.conf <VirtualHost *:80> ServerAdmin webmaster@localhost DocumentRoot /var/www/html/ Alias /file-hub /root/owner-workspace/file-hub <Directory /root/owner-workspace/file-hub> Options Indexes FollowSymLinks MultiViews AllowOverride None Require all granted DAV On AuthType Basic AuthName "WebDAV Restricted Area" AuthUserFile /etc/apache2/.htpasswd <LimitExcept GET OPTIONS> Require valid-user </LimitExcept> Order allow,deny allow from all </Directory> ErrorLog ${APACHE_LOG_DIR}/error.log CustomLog ${APACHE_LOG_DIR}/access.log combined </VirtualHost>
重启apache2服务
systemctl restart apache2
因为我设置了/root/owner-workspace/file-hub作为我的中转站目录,所以需要使得其具有文件权限
chmod 775 /root chmod 775 /root/owner-workspace/ chmod 775 /root/owner-workspace/file-hub/
至此,apache服务器已经可以正常使用了,如下所示
三、中转站的上传,下载,删除
对于中转站的上传,下载和删除,可以通过命令如下:
3.1 上传
curl -s -u $USER:$PASSWD -T "{$filename}" "172.25.130.31/file-hub/" -o /dev/null
3.2 下载
curl -O -u $USER:$PASSWD "172.25.130.31/file-hub/$filename"
3.3 删除
curl -X DELETE -u $USER:$PASSWD http://172.25.130.31/file-hub/$filename
3.4 脚本
大家可以根据上面命令的变体,编写upload.sh和download.sh脚本,这样就实现了文件的上传下载,这里给出示范如下:
# upload.sh USER="root" PASSWD="Ky1inos" WEBDEV="dev.kpan.com" argv=$# is_dir(){ if [ -d $1 ] then for i in `ls $1` do is_dir $1/$i done else fn+="$1 " fi } main(){ if [ "$argv"x == "0"x ] then usage; exit 0 fi # 上传目录 fn= for i in $@ do is_dir $i done filename=`echo $fn | tr ' ' ','` curl -s -u $USER:$PASSWD -T "{$filename}" "$WEBDEV/file-hub/" -o /dev/null } main $@ # download main(){ if [ "$argv"x == "0"x ] then usage; exit 0 fi # 上传目录 fn= for i in $@ do is_dir $i done filename=`echo $fn | tr ' ' ','` curl -O -u $USER:$PASSWD "$WEBDEV/file-hub/$filename" } # delete.sh main(){ if [ "$argv"x == "0"x ] then usage; exit 0 fi # 上传目录 fn= for i in $@ do is_dir $i done filename=`echo $fn | tr ' ' ','` curl -X DELETE -u $USER:$PASSWD "$WEBDEV/file-hub/$filename" }
上面脚本完成了基本功能,但是很多边界并没有考虑,大家在自己实现的时候可以考虑更全面一点
四、定期整理文件
我们作为中转站,需要每天按照日期归档文档,脚本如下:
#!/bin/bash FILE_HUB_DIR="/root/owner-workspace/file-hub" cd ${FILE_HUB_DIR} DATE=`date +%Y-%m-%d` [ -d ${DATE} ] && mv ${DATE} "${DATE}_bak" mkdir ${DATE} for file in $(ls ${FILE_HUB_DIR}) do [ -d ${file} ] && continue mv ${file} ${DATE}/ done COUNT=`ls ${DATE} | wc -l` if [ "${COUNT}"x == "0"x ] then alias rmdir=rmdir rmdir ${DATE} fi
脚本临时写出来,逻辑比较简单,为了让其能够正常的按天运行,如下配置crontab
crontab -e 0 1 * * * /usr/local/bin/organize_files.sh
五、简单的提示界面
根据上面的操作,我们已经完成了中转站的基本功能,为了让别人登录服务器的时候,更清楚我们登录了中转站,所以我们需要编写一个index.html,如下
vim /var/www/html/index.html <!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8"> <meta name="viewport" content="width=device-width, initial-scale=1.0"> <title>File Hub</title> <style> body { font-family: Arial, sans-serif; background-color: #f4f4f4; margin: 0; padding: 0; display: flex; justify-content: center; align-items: center; height: 100vh; } .container { background-color: white; padding: 20px; border-radius: 8px; box-shadow: 0 0 10px rgba(0, 0, 0, 0.1); text-align: center; } a { text-decoration: none; color: #007BFF; } a:hover { text-decoration: underline; } </style> </head> <body> <div class="container"> <h1>欢迎使用麒麟文件中转站</h1> <p>请登录到 <a href="http://172.25.130.31/file-hub">http://172.25.130.31/file-hub</a> 查看当前中转站内容.</p> </div> </body> </html>
此时页面如下:
至此,我们完成了一个文件中转站的基本功能。欢迎大家使用
了解到大家对于程序如何启动抱有极大的兴趣,尽管我们了解elf的组成原理,但是和程序的启动还是不太一致的,本文通过一个最简单的程序,来浅析一下一个程序的启动过程。便于大家更加深入的了解linux中一个程序的启动过程
一、最简单的C程序举例
我们在聊到C程序的时候,我相信所有人都或多或少了解过谭浩强的C语言书籍,我以第一节为例,如下:
其中的代码内容如下:
#include <stdio.h> int main() { printf("This is a C program.\n"); return 0; }
我们编译后运行如下:
# gcc first_c.c -g -o c && ./c This is a C program.
二、探究程序的调用过程
2.1 谁调用的main
根据上面的代码,我们获取了第一个c程序,我们./c就能运行。但是这里还远远不够,我们压根还不知道这个程序是如何被运行的。所以我们需要开始调试它
# gdb ./c Reading symbols from ./c... (gdb)
我们先断点在main上然后运行
(gdb) b main Breakpoint 1 at 0x40059c: file first_c.c, line 5. (gdb) r Starting program: /root/c/c [Thread debugging using libthread_db enabled] Using host libthread_db library "/lib/aarch64-linux-gnu/libthread_db.so.1". Breakpoint 1, main () at first_c.c:5 5 printf("This is a C program.\n");
此时我们查看一下x30寄存器,这是arm的lr寄存器,保存函数返回地址的
(gdb) x $x30 0x7ff7e3bd90 <__libc_start_main+232>: 0x940055c8
这里gdb友善的提供了提示__libc_start_main+232,我们可以发现是在__libc_start_main的sp指针的+232的位置,根据这个信息,我们拿到了main的上一个调用函数__libc_start_main
2.2 谁调用的__libc_start_main
此时我们将断点放在__libc_start_main上,重新运行,如下:
(gdb) b __libc_start_main Breakpoint 2 at 0x7ff7e3bca8: file ../csu/libc-start.c, line 141. (gdb) d 1 (gdb) r The program being debugged has been started already. Start it from the beginning? (y or n) y Starting program: /root/c/c [Thread debugging using libthread_db enabled] Using host libthread_db library "/lib/aarch64-linux-gnu/libthread_db.so.1". Breakpoint 2, __libc_start_main (main=0x4004d8 <__wrap_main>, argc=1, argv=0x7ffffff1d8, init=0x4005b8 <__libc_csu_init>, fini=0x400638 <__libc_csu_fini>, rtld_fini=0x7ff7fdac90, stack_end=0x7ffffff1d0) at ../csu/libc-start.c:141 141 ../csu/libc-start.c: 没有那个文件或目录.
然后我们继续查看x30的值
(gdb) x $x30 0x4004d4 <_start+52>: 0x97ffffeb
这里可以发现是_start函数调用了__libc_start_main
2.3 谁调用了_start
我们继续跟踪,如下:
(gdb) b _start Breakpoint 3 at 0x4004ac (gdb) d 2 (gdb) r The program being debugged has been started already. Start it from the beginning? (y or n) y Starting program: /root/c/c [Thread debugging using libthread_db enabled] Using host libthread_db library "/lib/aarch64-linux-gnu/libthread_db.so.1". Breakpoint 3, 0x00000000004004ac in _start ()
此时我们查看x30,发现了一个现象如下:
(gdb) x $x30 0x0: Cannot access memory at address 0x0
这里可以发现,_start没有满足调用约定了。
对于一个函数,如果不遵守调用约定了,那么我们可以知道,这个函数一定是第一个执行的函数,没有比它更早的函数调用。
我们可以通过readelf能够看到,如下:
# readelf -h c ELF 头: Magic: 7f 45 4c 46 02 01 01 00 00 00 00 00 00 00 00 00 类别: ELF64 数据: 2 补码,小端序 (little endian) Version: 1 (current) OS/ABI: UNIX - System V ABI 版本: 0 类型: EXEC (可执行文件) 系统架构: AArch64 版本: 0x1 入口点地址: 0x4004ac 程序头起点: 64 (bytes into file) Start of section headers: 7256 (bytes into file) 标志: 0x0 Size of this header: 64 (bytes) Size of program headers: 56 (bytes) Number of program headers: 9 Size of section headers: 64 (bytes) Number of section headers: 29 Section header string table index: 28 这里我们看到入口点地址是:0x4004ac
可以发现,我们的elf文件c程序,默认的ld的入口地址是0x4004ac,这个地址就是_start函数。这个_start函数最终会调用到main上。
三、程序启动后做了哪些事
3.1 _start函数做的事
根据上面我们知道,程序第一个函数入口是_start,我们可以对这个函数反汇编,如下:
(gdb) disassemble Dump of assembler code for function _start: 0x00000000004004a0 <+0>: mov x29, #0x0 // #0 0x00000000004004a4 <+4>: mov x30, #0x0 // #0 0x00000000004004a8 <+8>: mov x5, x0 => 0x00000000004004ac <+12>: ldr x1, [sp] 0x00000000004004b0 <+16>: add x2, sp, #0x8 0x00000000004004b4 <+20>: mov x6, sp 0x00000000004004b8 <+24>: adrp x0, 0x400000 0x00000000004004bc <+28>: add x0, x0, #0x4d8 0x00000000004004c0 <+32>: adrp x3, 0x400000 0x00000000004004c4 <+36>: add x3, x3, #0x5b8 0x00000000004004c8 <+40>: adrp x4, 0x400000 0x00000000004004cc <+44>: add x4, x4, #0x638 0x00000000004004d0 <+48>: bl 0x400460 <__libc_start_main@plt> 0x00000000004004d4 <+52>: bl 0x400480 <abort@plt> End of assembler dump.
可以发现,这里默认设置x29和x30为0,然后跳转到0x400460 <__libc_start_main@plt>上,我们随机跟到代码中,如下:
这里以glibc-2.31为例,glibc-2.31/sysdeps/aarch64/start.S这里_start函数如下
.text .globl _start .type _start,#function _start: /* Create an initial frame with 0 LR and FP */ mov x29, #0 mov x30, #0 /* Setup rtld_fini in argument register */ mov x5, x0 /* Load argc and a pointer to argv */ ldr PTR_REG (1), [sp, #0] add x2, sp, #PTR_SIZE /* Setup stack limit in argument register */ mov x6, sp #ifdef PIC # ifdef SHARED adrp x0, :got:main ldr PTR_REG (0), [x0, #:got_lo12:main] adrp x3, :got:__libc_csu_init ldr PTR_REG (3), [x3, #:got_lo12:__libc_csu_init] adrp x4, :got:__libc_csu_fini ldr PTR_REG (4), [x4, #:got_lo12:__libc_csu_fini] # else adrp x0, __wrap_main add x0, x0, :lo12:__wrap_main adrp x3, __libc_csu_init add x3, x3, :lo12:__libc_csu_init adrp x4, __libc_csu_fini add x4, x4, :lo12:__libc_csu_fini # endif #else /* Set up the other arguments in registers */ MOVL (0, main) MOVL (3, __libc_csu_init) MOVL (4, __libc_csu_fini) #endif /* __libc_start_main (main, argc, argv, init, fini, rtld_fini, stack_end) */ /* Let the libc call main and exit with its return code. */ bl __libc_start_main /* should never get here....*/ bl abort #if defined PIC && !defined SHARED /* When main is not defined in the executable but in a shared library then a wrapper is needed in crt1.o of the static-pie enabled libc, because crt1.o and rcrt1.o share code and the later must avoid the use of GOT relocations before __libc_start_main is called. */ __wrap_main: b main #endif /* Define a symbol for the first piece of initialized data. */ .data .globl __data_start __data_start: .long 0 .weak data_start data_start = __data_start
这里很明显做了如下:
- 初始化LR和FP寄存器
- 将第一个参数rtld_fini给到x4
- 将参数加载到$sp
- 跳转到__libc_start_main
3.2 __libc_start_main函数做的事
我们可以翻阅glibc的代码,在csu/libc-start.c有函数的定义,如下:
#ifdef LIBC_START_MAIN # ifdef LIBC_START_DISABLE_INLINE # define STATIC static # else # define STATIC static inline __attribute__ ((always_inline)) # endif #else # define STATIC # define LIBC_START_MAIN __libc_start_main #endif STATIC int LIBC_START_MAIN (int (*main) (int, char **, char ** MAIN_AUXVEC_DECL), int argc, char **argv, #ifdef LIBC_START_MAIN_AUXVEC_ARG ElfW(auxv_t) *auxvec, #endif __typeof (main) init, void (*fini) (void), void (*rtld_fini) (void), void *stack_end) { ........ exit (result); }
这里我们留意参数可以知道需要调用如下:
__typeof (main) init void (*fini) (void) void (*rtld_fini) (void), void *stack_end) exit (result);
这里可以知道,__libc_start_main会调用.init,.fini ,mian和exit以及rtld_fini。
这里.init 和.fini 是用作代码运行时构造和析构的默认回调接口
这里rtld_fini 是ld的清理函数。接下来注意解析:
3.2.1 rtld_fini
此函数是x5寄存器
(gdb) x $x5 0x7ff7fdac90: 0xa9b87bfd
我们可以gdb内部设置断点如下:
(gdb) b *0x7ff7fdac90 Breakpoint 4 at 0x7ff7fdac90
然后继续运行
(gdb) c Continuing. This is a C program. Breakpoint 4, 0x0000007ff7fdac90 in ?? () from /lib/ld-linux-aarch64.so.1
可以发现程序正常运行推出后,会断点停在/lib/ld-linux-aarch64.so.1内部。
但是我们进行反汇编却看不到代码调用,说明实际上是一个栈区地址而已,并不是完整的函数
(gdb) disassemble No function contains program counter for selected frame.
3.2.2 init
我们知道.init函数是x3,所以可以根据如下汇编计算
0x00000000004004c0 <+32>: adrp x3, 0x400000 0x00000000004004c4 <+36>: add x3, x3, #0x5b8
我们加上断点后运行如下:
(gdb) b *0x4005b8 Breakpoint 5 at 0x4005b8 (gdb) c Continuing. Breakpoint 5, 0x00000000004005b8 in __libc_csu_init ()
可以发现函数是__libc_csu_init,我们反汇编
(gdb) disassemble Dump of assembler code for function __libc_csu_init: => 0x00000000004005b8 <+0>: stp x29, x30, [sp, #-64]! 0x00000000004005bc <+4>: mov x29, sp 0x00000000004005c0 <+8>: stp x19, x20, [sp, #16] 0x00000000004005c4 <+12>: adrp x20, 0x410000 0x00000000004005c8 <+16>: add x20, x20, #0xdf0 0x00000000004005cc <+20>: stp x21, x22, [sp, #32] 0x00000000004005d0 <+24>: adrp x21, 0x410000 0x00000000004005d4 <+28>: add x21, x21, #0xde8 0x00000000004005d8 <+32>: sub x20, x20, x21 0x00000000004005dc <+36>: mov w22, w0 0x00000000004005e0 <+40>: stp x23, x24, [sp, #48] 0x00000000004005e4 <+44>: mov x23, x1 0x00000000004005e8 <+48>: mov x24, x2 0x00000000004005ec <+52>: bl 0x400420 <_init> 0x00000000004005f0 <+56>: cmp xzr, x20, asr #3 0x00000000004005f4 <+60>: b.eq 0x400620 <__libc_csu_init+104> // b.none 0x00000000004005f8 <+64>: asr x20, x20, #3 0x00000000004005fc <+68>: mov x19, #0x0 // #0 0x0000000000400600 <+72>: ldr x3, [x21, x19, lsl #3] 0x0000000000400604 <+76>: mov x2, x24 0x0000000000400608 <+80>: add x19, x19, #0x1 0x000000000040060c <+84>: mov x1, x23 0x0000000000400610 <+88>: mov w0, w22 0x0000000000400614 <+92>: blr x3 0x0000000000400618 <+96>: cmp x20, x19 0x000000000040061c <+100>: b.ne 0x400600 <__libc_csu_init+72> // b.any 0x0000000000400620 <+104>: ldp x19, x20, [sp, #16] 0x0000000000400624 <+108>: ldp x21, x22, [sp, #32] 0x0000000000400628 <+112>: ldp x23, x24, [sp, #48] 0x000000000040062c <+116>: ldp x29, x30, [sp], #64 0x0000000000400630 <+120>: ret End of assembler dump.
这里可以看到会跳转到_init函数,我们继续断点
(gdb) b *_init Breakpoint 6 at 0x7ff7e3bc08: file init-first.c, line 55.
运行如下:
(gdb) r Starting program: /root/c/c [Thread debugging using libthread_db enabled] Using host libthread_db library "/lib/aarch64-linux-gnu/libthread_db.so.1". Breakpoint 6, _init (argc=1, argv=0x7ffffff1d8, envp=0x7ffffff1e8) at init-first.c:55 55 init-first.c: 没有那个文件或目录.
此时进入_init函数内部
(gdb) c Continuing. Breakpoint 18, 0x0000000000400420 in _init () (gdb) disassemble Dump of assembler code for function _init: => 0x0000000000400420 <+0>: stp x29, x30, [sp, #-16]! 0x0000000000400424 <+4>: mov x29, sp 0x0000000000400428 <+8>: bl 0x4004dc <call_weak_fn> 0x000000000040042c <+12>: ldp x29, x30, [sp], #16 0x0000000000400430 <+16>: ret End of assembler dump.
可以发现,其就是运行的默认的init回调,我们可以objdump查看如下:
objdump -d c.o Disassembly of section .init: 0000000000400420 <_init>: 400420: a9bf7bfd stp x29, x30, [sp, #-16]! 400424: 910003fd mov x29, sp 400428: 9400002d bl 4004dc <call_weak_fn> 40042c: a8c17bfd ldp x29, x30, [sp], #16 400430: d65f03c0 ret
3.2.3 fini
我们知道fini是保存在x4,所以如下:
0x00000000004004c8 <+40>: adrp x4, 0x400000 0x00000000004004cc <+44>: add x4, x4, #0x638
此时我们计算出函数如下:
(gdb) x 0x400638 0x400638 <__libc_csu_fini>: 0xd65f03c0
我们直接反汇编如下:
(gdb) disassemble __libc_csu_fini Dump of assembler code for function __libc_csu_fini: 0x0000000000400638 <+0>: ret End of assembler dump.
可以看到此函数直接是一个返回
我们通过objdump如下:
Disassembly of section .fini: 000000000040063c <_fini>: 40063c: a9bf7bfd stp x29, x30, [sp, #-16]! 400640: 910003fd mov x29, sp 400644: a8c17bfd ldp x29, x30, [sp], #16 400648: d65f03c0 ret
可以发现一致。
3.2.4 main
我们知道main函数是__libc_start_main中直接调用的我们反汇编后,注意这个语句
0x0000007ff7e3bd88 <+224>: ldr x3, [sp, #104] 0x0000007ff7e3bd8c <+228>: blr x3
代码运行如下:
(gdb) b *0x0000007ff7e3bd8c Breakpoint 31 at 0x7ff7e3bd8c: file ../csu/libc-start.c, line 308. (gdb) c Continuing. Breakpoint 31, 0x0000007ff7e3bd8c in __libc_start_main (main=0x4004d8 <__wrap_main>, argc=1, argv=0x7ffffff1d8, init=<optimized out>, fini=<optimized out>, rtld_fini=<optimized out>, stack_end=<optimized out>) at ../csu/libc-start.c:308 308 in ../csu/libc-start.c
可以发现其跳转了x3,然后以0x0000007ff7e3bd90作为lr,我们计算sp+104的值,如下:
(gdb) x $sp+104 0x7ffffff0e8: 0x004004d8
可以发现blr会跳转到0x004004d8,我们解释这个地址
(gdb) x 0x004004d8 0x4004d8 <__wrap_main>: 0x1400002f
然后打上断点
(gdb) b *0x004004d8 Breakpoint 1 at 0x4004d8 (gdb) r Breakpoint 1, 0x00000000004004d8 in __wrap_main ()
然后反汇编
(gdb) disassemble Dump of assembler code for function __wrap_main: => 0x00000000004004d8 <+0>: b 0x400594 <main> End of assembler dump.
这里会直接跳转到mian,我们继续运行
(gdb) r Breakpoint 3, 0x0000000000400594 in main ()
然后再反汇编main函数,如下
(gdb) disassemble Dump of assembler code for function main: => 0x0000000000400594 <+0>: stp x29, x30, [sp, #-16]! 0x0000000000400598 <+4>: mov x29, sp 0x000000000040059c <+8>: adrp x0, 0x400000 0x00000000004005a0 <+12>: add x0, x0, #0x668 0x00000000004005a4 <+16>: bl 0x400490 <puts@plt> 0x00000000004005a8 <+20>: mov w0, #0x0 // #0 0x00000000004005ac <+24>: ldp x29, x30, [sp], #16 0x00000000004005b0 <+28>: ret End of assembler dump.
然后我们将c程序直接objdump,如下
0000000000400594 <main>: 400594: a9bf7bfd stp x29, x30, [sp, #-16]! 400598: 910003fd mov x29, sp 40059c: 90000000 adrp x0, 400000 <_init-0x420> 4005a0: 9119a000 add x0, x0, #0x668 4005a4: 97ffffbb bl 400490 <puts@plt> 4005a8: 52800000 mov w0, #0x0 // #0 4005ac: a8c17bfd ldp x29, x30, [sp], #16 4005b0: d65f03c0 ret 4005b4: d503201f nop
可以发现是完全一样的。这里我们正常跟踪到了main函数
四、总结
通过此程序,我们可以知道一个程序的启动过程,从elf作为开始,ld加载了entrypoint后,是通过启动了_start的text label后,然后再逐渐调用到main函数的。
相当于从程序的最开头,进行了简单的了解了一个程序的启动过程。
随着人员逐渐多,并且处理的事情越来越多,导致服务经常出现io占用高,cpu占用高,内存占用高三种情况。本文通过crontab的方式定时进行查询和设置,来实现定期对服务的资源限制,从而确保服务不会突然卡死的情况出现
一、问题描述
在一个服务器上,多人进行编辑,编译时,通常情况下,编译的时候会把cpu,memery,io占满,三者只要有其一出现满负载,则打开的vim程序会出现,卡顿,杀掉,卡死。
对于cpu满负载而言,通常是vim程序得不到该有的调度,主要原因是vim的PRI和NI是80和0,而常规程序的优先级也是80和0,此时vim程序卡顿
对于memory满负载而言,通常是系统内存不足时,不得已情况下,通过out_of_memory函数选择一个oom score最低的程序进行杀掉,vim通常会是得分较低的进程。主要原因是vim的score是0,而常规程序的score也是0。此时vim可能被杀死
对于io负载而言,通常是io状态是陷入并且阻塞的,如果io负载高,则短时间内所有进程无法都被block住,无法被调度,此时vim出现卡死
所以,为了解决编译和编辑时的服务器负载问题,需要通过一个脚本来实现对cpu,io,memory的控制,从而使得编辑程序vim得到该有的调度,而编译程序也能正常运行。
二、工具
为了实现上述的功能,需要借助cpulimit,cgroup, ionice三个工具
2.1 cpulimit
cpulimit是一个限制cpu使用率的工具,我们可以通过-p参数指定进程的pid,通过-l参数设置使用率百分比,从而限制进程使用率。介绍如下:
-p, --pid=N pid of the process -l, --limit=N percentage of cpu allowed from 1 up. Usually 1 - 4800, but can be higher on multi-core CPUs (mandatory)
所以,对于cpu满负载的情况,通过cpulimit限制当前最高使用率的进程,从而对突出的程序进行有效控制。让系统有办法调度到其他的程序
2.2 cgroup
cgroup是用作资源管理的内核框架,它作为文件系统存放于linux系统中,我们可以通过cgroup设置某个进程的内存使用情况,具体如下:
/sys/fs/cgroup/memory/kylin_limit/memory.limit_in_bytes
所以,对于io满负载的情况,通过cgroups设置memory.limit_in_bytes来限制高占用进程的内存占用率,从而对高内存占用程序进行有效控制,让系统其他进程能够正常申请到内存。
不过值得注意的是,对于进程的内存使用限制可能导致进程运行失败,所以通常我们在服务器上设置单个进程使用不超过总内存的10%,通常服务器的总内存为64G,则单个进程使用内存不应该超过6.4G。通常来说,单个进程的内存使用量如果超过6.4G已经存在异常。所以没有问题。
但是如果是小内存的设备,通过memory.limit_in_bytes来限制指定进程的内存使用率并不可取,假设在内存4G的机器上,我们限制进程的内存使用率仍是10%,则单个进程使用内存不超过400M,又由于很多程序可能使用内存大于400M(属于正常现象),这会导致进程的oom,所以我们应该做的是通过增大swap来将内存压力转换为io压力。
通过swap来转换内存压力为io压力的方法如下:
mkswap /dev/sda1 swapon /dev/sda1
如果我们不是真实的设备,可以将swap开启在img文件上,如下
dd if=/dev/zero of=/tmp/swap bs=512 count=20480000 mkswap /tmp/swap swapon /tmp/swap
2.3 ionice
ionice是用作调整进程的io优先级的命令,通过ionice命令,可以设置指定进程作为实时的io调度,从而加速系统对某些进程的io行为。主要如下:
ionice -c 2 -n 7 -p ${pid} # 设置pid进程的调度为尽力,并优先级设置为7 ionice -c 1 -p ${pid} # 设置pid进程的调度为实时
这里-c可以设置优先级,-n设置优先级,-p设置pid,介绍如下
用法: ionice [选项] -p <pid>... ionice [选项] -P <pgid>... ionice [选项] -u <uid>... ionice [选项] <命令> 设置或更改进程的 IO 调度类别和优先级。 选项: -c, --class <类别> 调度类别的名称或数值 0: 无, 1: 实时, 2: 尽力, 3: 空闲 -n, --classdata <数字> 指定调度类别的优先级(0..7),只针对 “实时”和“尽力”类别 -p, --pid <pid>... 对这些已运行的进程操作 -P, --pgid <pgrp>... 对这些组中已运行的进程操作 -t, --ignore 忽略失败 -u, --uid <uid>... 对属于这些用户的已运行进程操作 -h, --help 显示此帮助 -V, --version 显示版本
所以,对于满io负载的情况,可以通过ionice命令对io刷盘进程如flush进行实时调度,对io使用率高的程序使用优先级最低为7的尽力调度,从而可以使得vim的写操作可以正常的flush,并且可能从普通进程上抢到io的调度。
三、具体操作
根据上述的介绍,我们可以通过三个工具完成对应的功能,现在介绍如何实施
3.1 限制最高cpu占用率的进程
为了限制高占用的进程,我们需要在系统长时间占用高的情况下找到占用高的进程,因为某些短时进程会占用很高(例如top后一直按enter来一直刷新),这些我们应该忽略。所以需要先获取平均负载,如下:
load=`cat /proc/loadavg | cut -f1 -d' '`
上面可以获取1分钟内的平均负载,如果平均负载大于100,则认为1分钟内,进程占用高,可能在后台执行编译动作
declare -i loadavg=`echo "${load} * 100" | bc | awk -F. '{print $1}'` if (( ${loadavg} >= ${LOAD_CPU_THRESHOLD} ))
此时我们可以通过ps命令找出最高占用的那个进程
high_exe=`ps -eo user,pid,pcpu,pmem,args --sort=-pcpu |sed -n 2p | xargs`
根据ps的结果,可以获取进程的pid和name,如下
pid=`echo ${high_exe} | awk '{print $2}'` pid_name=`echo ${high_exe} | awk '{print $5}'`
根据pid值,我们可以知道是谁连接的ssh客户端,找到ip如下
who=`cat /proc/${pid}/environ | tr '\0' '\n' | grep SSH_CONNECTION | cut -d= -f2 | awk '{print $1":" $2}'`
同时通过cpulimit设置此进程的占用率不超过100%
cpulimit -p ${pid} -l 100 > /dev/null 2>&1 &
至此,如果crontab每一10分钟轮询一次,系统将查询最近1分钟内是否负载高,如果负载高,则找出当前占用最高的进程,设置其占用率不超过100%
3.2 限制程序使用最高内存
为了限制高内存占用的程序,我们需要在系统剩余内存不足时找出内存占用最高的进程,然后将其设置为总内存的10%,从而让其他程序有可能申请到内存。
基于此思路,我们需要判断当前内存剩余量,如下
declare -i free=`free -m | sed -n 2p | xargs | cut -f7 -d' '`
上面可以获取到剩余内存,当然,同样通过free命令,我们也可以获取到总共内存,我们需要判断一下剩余内存是否小于总共内存的比例即可,具体比例可以自行设置,建议10%
如果剩余内存小于总共内存的10%,我们需要找到高内存的进程,如下
high_mem_exe=`ps -eo pid,pcpu,pmem,args --sort=-pmem |sed -n 2p | xargs`
同样的,通过上面可以知道高内存占用进程的pid和name,以及谁ssh登录的,如下
pid=`echo ${high_mem_exe} | awk '{print $1}'` pid_name=`echo ${high_mem_exe} | awk '{print $4}'` who=`cat /proc/${pid}/environ | tr '\0' '\n' | grep SSH_CONNECTION | cut -d= -f2 | awk '{print $1":" $2}'`
我们知道pid之后,便可以通过cgroup设置进程的最大内存使用量
[ ! -d /sys/fs/cgroup/memory/kylin_limit ] && mkdir /sys/fs/cgroup/memory/kylin_limit echo ${pid} > /sys/fs/cgroup/memory/kylin_limit/tasks echo $(expr $total \/ 10 \* 1024) > /sys/fs/cgroup/memory/kylin_limit/memory.limit_in_bytes
这里total是总内存大小,可以通过free命令获取,我们可以设置cgroup下的kylin_limit组的内存使用率不能超过总内存的10%
至此,如果crontab每10分钟轮询一次,系统将查询当前剩余内存,如果剩余内存不足总内存的某个比例,则可以通过cgroups设置最高内存占用率的进程其最大内存使用量不超过总内存的10%
3.3 限制程序io的政策
程序的io都是block的,因为谁也不知道陷入io处理需要多久时间,所以通常如果io存在瓶颈,大部分情况下都是cpu在等io,从而导致vim卡死的情况
通常来说,对于磁盘来说,刷盘是由内核线程[kworker/uxx:x+flush-x:xxx]实现,如果是文件系统write,也可能是mount进程中实现。本文只讨论常出现的flush
首先我们需要找到io占用率高的进程,如下
io_message=`iotop -n 1 -b -o | grep -v WRITE | xargs`
从上述的信息获取到io占用率和pid以及name
percent=`echo ${io_message} | awk '{print $10}'` name=`echo ${io_message} | awk '{print $12}'` pid=`echo ${io_message} | awk '{print $1}'`
如果进程是flush,则当前io压力最大的是刷盘线程
if [[ ${pid_name} =~ "kworker" ]] then if [[ ${pid_name} =~ "flush" ]] then
此时我们可以通过ionice命令设置flush线程为实时io调度,如下
ionice -c 1 -p ${pid}
如果io占用率超过99%了,则说明有io占用很高的进程,如下
echo ${percent} | egrep "^99.**" > /dev/null
此时我们可以将此进程设置为尽力,优先级放最低为7,此时程序能够正常跑即可,相当于以时间换内存空间
ionice -c 2 -n 7 -p ${pid}
至此,如果crontab每10分钟轮询一次,系统将找到io占用高的进程,先判断是否为flush,如果是flush则调整为实时,如果不是,则是其他进程io占用高,此时将其他进程调整为尽力,优先级最低为7
当然,如果io密集型的任务多,我们可以让其1分钟运行一次,在不改变crontab的前提下,可以做个循环如下:
for((i=0;i<10;i++)); do io_policy ret=$? if [ "${ret}"x == "1" ] then sleep 60 fi done
3.4 crontab定时
对于上述的策略,我们可以10分钟运行一次,首先将其脚本命名为kylin-server-status.sh,通过crontab -e编写如下:
*/10 * * * * /usr/local/bin/kylin-server-status.sh
至此,服务器会每10分钟轮询一次
