关于内存泄漏这里就不说明了,我们知道在调试过程中,很多情况下并不算内存泄漏,例如分配的内存就是需要使用的,某些机制就需要申请内存,对象销毁才回收内存,那么它就不能算作内存泄漏,为了定位这种内存的使用情况,从而减少内存的使用情况,massif工具能够刨析内存的使用情况,然后结合代码解决这种问题。
安装
安装很简单,我们需要具备valgrind和massif-visualizer两个工具,如下
apt install massif-visualizer valgrind
使用
我们借助valgrind来加载massif工具,如下命令即可
valgrind --tool=massif ./ukui-tablet-desktop
当我们程序运行之后,可以将程序退出,那么本地会生成massif.out.pid的文件,根据这个文件就可以进行分析内存使用情况
分析
分析通过massif-visualizer,命令举例如下
massif-visualizer massif.out.31446
此时我们可以看到界面如下

这里两个信息很重要
- 左上角的heap的消耗情况
- 右边的内存数据情况,点击它会反应在中间的图标上
为了方便查看,我特地扩展了一下右侧的信息,这样就能够很方便的知道内存占用究竟是在哪里了。如下

这里拿峰值的72m为例,在72m的节点上,我们知道渲染使用了24M,QImage加载图片用了11M QImage构造用了2M。这都是实实在在的内存使用情况,展开就能看到函数调用。
调试底层内存占用
massif能够查看内存占用,这些默认是基于上层代码函数的,如果是基于底层malloc, calloc, realloc, memalign, new等函数的,那么我们需要添加一个参数 --pages-as-heap=yes 即可。这样我们查看内存的使用情况关注点就来到了glibc上或自写的内存池上了。
为什么要这样查看呢,其实问题到这里的时候已经不是内存泄漏了,而是内存使用情况了,如果不去看底层内存管理机制,那么想降低内存的使用情况只能动复用内存或内存池或自行实现内存管理。所以才有--pages-as-heap=yes的出现。
那么演示如下:
首先我们收集日志如下
valgrind --tool=massif --pages-as-heap=yes ./ukui-tablet-desktop
退出程序之后,我们打开massif的日志界面 如下,这里我直接在峰值展开如下

这里我们就可以看到glibc内存管理的细节了,我们看到mmap arena tcache malloc free dl_map_segments 这类底层函数内存占用了。我们可以通过这些信息,为内存管理投其所好的进行内存优化,例如常用fastbin,大内存直接mmap等方式减少内存碎片。
了解glibc的简单原理可看我之前的文章。
总结
并不是所有的内存问题都是泄漏,很多情况下其实是内存占用太大而已,实际还是需要使用的,那么这种情况下我们需要使用massif来查看内存布局,massif可以从两个角度调试,一个是应用角度,根据信息结合代码来进行初步调优,另一个是内存管理角度,根据信息结合glibc内存管理策略或自己写的内存管理程序策略来优化内存的分配,提高小块内存的利用率和减少大块内存的重复分配以及减少内存碎片。
这里介绍了massif,后续如果定位非内存泄漏问题会非常方便。
参考文章
massif可以参考如下文章,原理性的东西我就不二转手了。
heaptrack是kde的内存调试工具,我们在定位内存泄漏的时候,为了方便定位可以安装此工具来排查,下面是heaptrack的使用方法
安装
安装方式如下
apt install heaptrack heaptrack-gui libheaptrack
监听内存泄漏
heaptrack不需要太多的参数支持,直接heaptrack追加需要监控的进程即可,如下
heaptrack ./ukui-tablet-desktop
因为我们调试内存泄漏的时候,大概是知道泄漏的点或者行为,此时进入程序触发泄漏行为即可。当泄漏出现的时候,我们关掉程序,可以在当前目录获得名字为heaptrack.name.pid.gz类似的文件,此时直接加载此调试文件即可,如下
打开分析界面
直接使用heaptrack_gui即可,如下
heaptrack_gui /home/kylin/heaptrack.ukui-tablet-desktop.29058.gz
此时我们可以看到图片如下

这里已经大概告诉你泄漏的函数原因了,可以继续追代码了。
如果我们需要看详细的统计数据,我们可以跳转到Flame Graph中,当然任何内存泄漏都有一定阈值,我们可以设置Cost Threshold即可,这里设置10%。如下所示

这里就直接看到超过10%的Cost的调用,直接就能看出原因。
虽然上面可以查看到简单的内存泄漏,但是内存泄漏是长期的,我们需要长时间盯着内存的消耗增长,那么我们可以挂机72小时后,在Consumed中查看其增长情况,如下。

此时如果是长时间挂机,内存不是趋于平稳,那么就说明内存泄漏比较明显了。否则我们只能说内存会被一定情况下被使用。
总结
至此,我们基于heaptrack能够很方便的定位内存泄漏问题了,它不同于valgrind,大型的程序使用valgrind会导致性能十分低下,不方便排查问题。而像kde这种大型qt项目或其他,heaptrack是一个非常不错的选择。
之前把rtems上支持的所有的调度器介绍了一遍,但是一直都没有说上下文是如何切换的。其实上下文切换的逻辑就是保存线程TCB和通用寄存器,然后根据新的线程TCB信息进行运行。本文从上下文切换的角度来讲清楚RTEMS中是怎么完成上下文切换的
从schedule函数角度看
对于任何的任务,调用schedule就是根据当前任务的情况执行调度,那么主动调用如下函数
( *scheduler->Operations.schedule )( scheduler, the_thread );
这里不同的调度算法实现的回调不一样,为了方便介绍,这里以优先级调度为例,那么最后调用函数如下
static inline void _Scheduler_uniprocessor_Update_heir( Thread_Control *heir, Thread_Control *new_heir ) { _Assert( heir != new_heir ); #if defined(RTEMS_SMP) /* * We need this state only for _Thread_Get_CPU_time_used_locked(). Cannot * use _Scheduler_Thread_change_state() since THREAD_SCHEDULER_BLOCKED to * THREAD_SCHEDULER_BLOCKED state changes are illegal for the real SMP * schedulers. */ heir->Scheduler.state = THREAD_SCHEDULER_BLOCKED; new_heir->Scheduler.state = THREAD_SCHEDULER_SCHEDULED; #endif _Thread_Update_CPU_time_used( heir, _Thread_Get_CPU( heir ) ); _Thread_Heir = new_heir; _Thread_Dispatch_necessary = true; }
再设置完一些state之后,我们重点关注如下两个值的设置
_Thread_Heir = new_heir; _Thread_Dispatch_necessary = true;
这里的new_heir是即将要运行的任务,他是Thread_Control * 指针。而_Thread_Dispatch_necessary是Per_CPU_Control结构体的一个成员dispatch_necessary,我们通过dispatch_necessary来判断当前任务是否要scheduler。
从_Thread_Do_dispatch函数角度看
我们当任务在合适的实际,我们可以设置dispatch enable,或者直接调用_Thread_Do_dispatch函数,这样线程就直接开始开始调度的实际行为。 我们看起核心代码如下
do { Thread_Control *heir; heir = _Thread_Get_heir_and_make_it_executing( cpu_self ); if ( heir == executing ) { break; } _ISR_Local_enable( level ); _Thread_Save_fp( executing ); _Context_Switch( &executing->Registers, &heir->Registers ); _Thread_Restore_fp( executing ); _User_extensions_Thread_switch( NULL, executing ); cpu_self = _Per_CPU_Get(); _ISR_Local_disable( level ); } while ( cpu_self->dispatch_necessary );
可以看到,只要dispatch_necessary设置为true,那么任务就会执行调度。执行调度的函数为_Context_Switch,它会根据每个架构的实现来运行上下文切换,我们基于armv8架构来介绍
从_CPU_Context_switch函数来看
这里主要是Arm64的实现,先看源码
DEFINE_FUNCTION_AARCH64(_CPU_Context_switch) .globl _CPU_Context_switch_no_return .set _CPU_Context_switch_no_return, _CPU_Context_switch #ifdef AARCH64_MULTILIB_ARCH_V8_ILP32 /* Sanitize inputs for ILP32 ABI */ mov w0, w0 mov w1, w1 #ifdef RTEMS_SMP #define reg_2 x2 #else #define reg_2 w2 #endif #else #define reg_2 x2 #endif /* Start saving context */ GET_SELF_CPU_CONTROL reg_2 ldr w3, [x2, #PER_CPU_ISR_DISPATCH_DISABLE] // 读取isr_dispatch_disable stp x19, x20, [x0] // 保存aapcs中规定的callee寄存器 也就是x19-x28 stp x21, x22, [x0, #0x10] stp x23, x24, [x0, #0x20] stp x25, x26, [x0, #0x30] stp x27, x28, [x0, #0x40] stp fp, lr, [x0, #0x50] // 保存fp和lr mov x4, sp // 保存sp寄存器 str x4, [x0, #0x60] #ifdef AARCH64_MULTILIB_VFP add x5, x0, #AARCH64_CONTEXT_CONTROL_D8_OFFSET stp d8, d9, [x5] // 保存浮点寄存器 stp d10, d11, [x5, #0x10] stp d12, d13, [x5, #0x20] stp d14, d15, [x5, #0x30] #endif str x3, [x0, #AARCH64_CONTEXT_CONTROL_ISR_DISPATCH_DISABLE] //将本线程的isr_dispatch_disable设置到x0 #ifdef RTEMS_SMP /* * The executing thread no longer executes on this processor. Switch * the stack to the temporary interrupt stack of this processor. Mark * the context of the executing thread as not executing. */ dmb SY //所有数据dmb add sp, x2, #(PER_CPU_INTERRUPT_FRAME_AREA + CPU_INTERRUPT_FRAME_SIZE) //分配一个栈 mov x3, #0 //将0写到is_executing中 strb w3, [x0, #AARCH64_CONTEXT_CONTROL_IS_EXECUTING_OFFSET] .L_check_is_executing: /* Check the is executing indicator of the heir context */ add x3, x1, #AARCH64_CONTEXT_CONTROL_IS_EXECUTING_OFFSET //获取is_executing的值 ldaxrb w4, [x3] //原子读取x3的内容到w4 cmp x4, #0 bne .L_get_potential_new_heir //如果已经其他cpu执行则跳到其他线程tcb上重新判断 /* Try to update the is executing indicator of the heir context */ mov x4, #1 stlxrb w5, w4, [x3] // 将is_executing设置回去,结果保存在w5 cmp x5, #0 bne .L_get_potential_new_heir // 如果设置失败,则跳到其他tcb上重新判断 dmb SY // dmb所有数据 #endif /* Start restoring context */ .L_restore: #if !defined(RTEMS_SMP) && defined(AARCH64_MULTILIB_HAS_LOAD_STORE_EXCLUSIVE) clrex // 清空独占监视器 #endif ldr x3, [x1, #AARCH64_CONTEXT_CONTROL_THREAD_ID_OFFSET] // 加载下一个线程的thread_id ldr x4, [x1, #AARCH64_CONTEXT_CONTROL_ISR_DISPATCH_DISABLE] // 加载下一个线程的isr_dispatch_disable #ifdef AARCH64_MULTILIB_VFP add x5, x1, #AARCH64_CONTEXT_CONTROL_D8_OFFSET // 加载下一个线程的浮点寄存器 ldp d8, d9, [x5] ldp d10, d11, [x5, #0x10] ldp d12, d13, [x5, #0x20] ldp d14, d15, [x5, #0x30] #endif msr TPIDR_EL0, x3 // 将x3设置到TPIDR_EL0 str w4, [x2, #PER_CPU_ISR_DISPATCH_DISABLE] // 更新isr_dispatch_disable ldp x19, x20, [x1] // 恢复下一个线程的callee寄存器 ldp x21, x22, [x1, #0x10] ldp x23, x24, [x1, #0x20] ldp x25, x26, [x1, #0x30] ldp x27, x28, [x1, #0x40] ldp fp, lr, [x1, #0x50] // 恢复fp和lr ldr x4, [x1, #0x60] mov sp, x4 //恢复sp ret
上面代码尽可能给出了注释,有些补充解释如下
x0和x1
我们知道_CPU_Context_switch的原型是:
_CPU_Context_switch( _executing, _heir )
所以x0 是当前线程tcb,x1是下一个线程的tcb
Context_Control结构体
我们知道需要保存x19-x30 sp等寄存器,那么保存的地方在TPIDR_EL0上,TPIDR_EL0上存在的是Context_Control的指针,所以Context_Control结构体如下。
typedef struct { uint64_t register_x19; uint64_t register_x20; uint64_t register_x21; uint64_t register_x22; uint64_t register_x23; uint64_t register_x24; uint64_t register_x25; uint64_t register_x26; uint64_t register_x27; uint64_t register_x28; uint64_t register_fp; uint64_t register_lr; uint64_t register_sp; uint64_t isr_dispatch_disable; uint64_t thread_id; #ifdef AARCH64_MULTILIB_VFP uint64_t register_d8; uint64_t register_d9; uint64_t register_d10; uint64_t register_d11; uint64_t register_d12; uint64_t register_d13; uint64_t register_d14; uint64_t register_d15; #endif #ifdef RTEMS_SMP volatile bool is_executing; #endif } Context_Control;
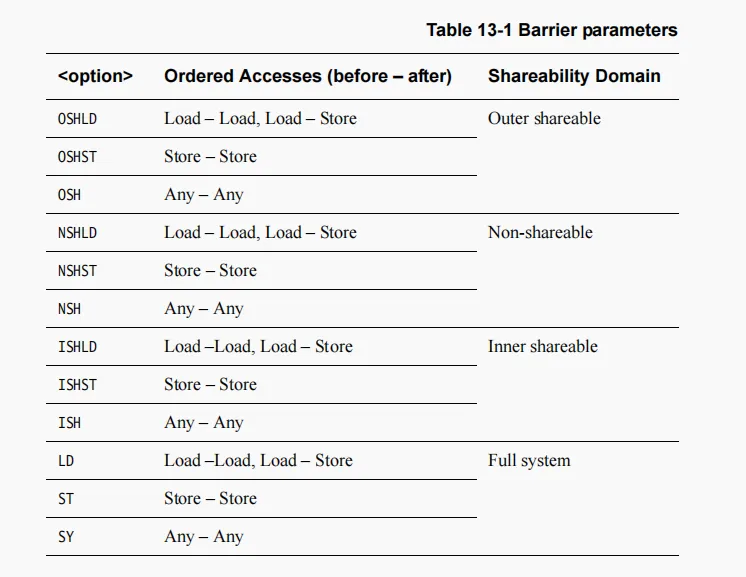
dmb SY
dmb是数据内存同步,SY是对全系统进行刷新,SY的解释如下
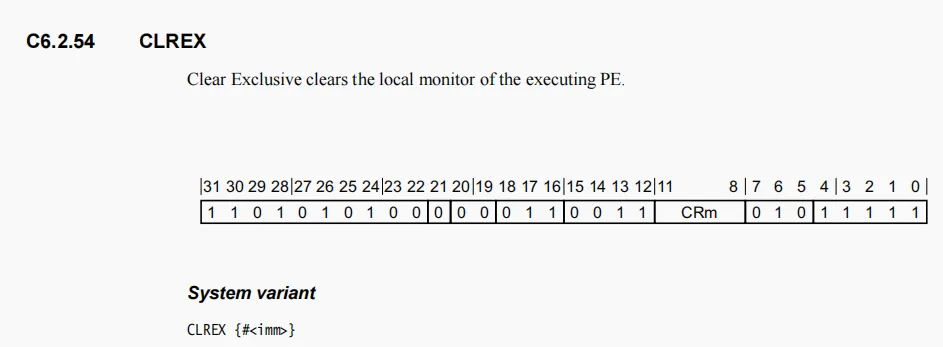
CLREX
Clear Exclusive access monitor,清空独占监视器,请问接下来要做独占访问,这里直接清空独占监视器
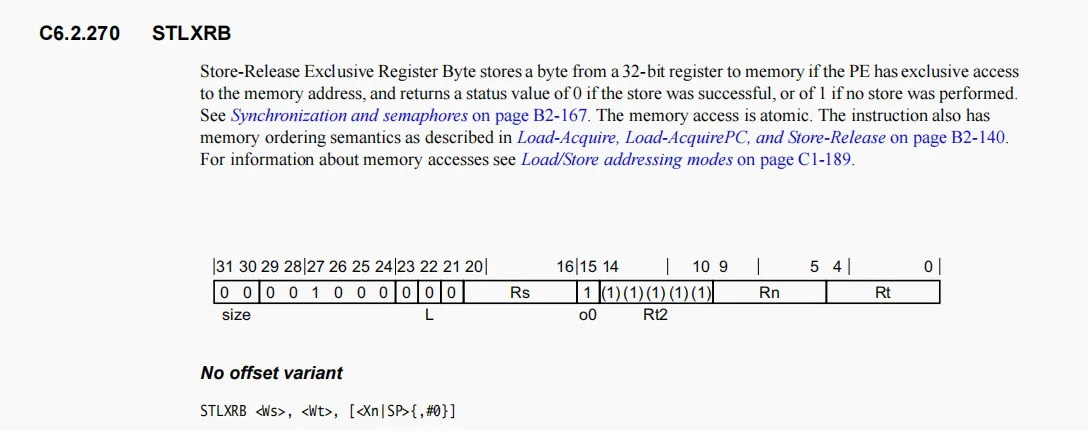
ldaxrb和stlxrb
这两个都是独占访问内存和独占存储内存,
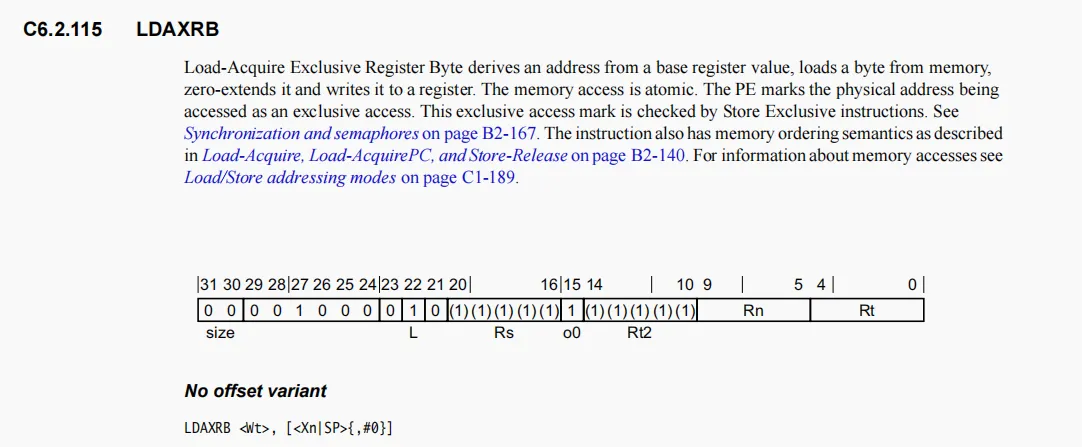
其中stlxrb会将"<Ws>"的值返回出来,如果是0则独占访问成功,如果非0则失败
总结
至此,我们根据上下文切换的代码分析,清楚的知道了调度器在任务运行时的寄存器保存过程和sp分配过程等。相关演示操作在之前的文章有过体现,gdb能够很清楚的看到任务分配后的寄存器显示,这里就没有必要重复了。
关于cbs调度算法,我们上面知道了其默认基于edf,以截止时间作为优先级,每个任务都有预算,当预算完成时任务也完成了,那么更新预算,重新周期,如果任务的unblock后的剩余占比大于设置预算设置占比,则将任务推迟运行。
本文基于rtems的测试用例,简单演示一下cbs调度算法
测试代码
为了支持测试,我们需要创建四个任务,这个比较常规,使用 rtems_task_create和rtems_task_start即可
在cbs中,我们需要额外调用rtems_cbs_initialize即可。那么代码如下
for ( index = 1 ; index <= NUM_TASKS ; index++ ) { status = rtems_task_create( Task_name[ index ], Priorities[ index ], RTEMS_MINIMUM_STACK_SIZE * 4, RTEMS_DEFAULT_MODES, RTEMS_DEFAULT_ATTRIBUTES, &Task_id[ index ] ); directive_failed( status, "rtems_task_create loop" ); } rtems_cbs_initialize(); for ( index = 1 ; index <= NUM_PERIODIC_TASKS ; index++ ) { status = rtems_task_start( Task_id[ index ], Tasks_Periodic, index ); directive_failed( status, "rtems_task_start loop" ); }
根据上面,任务开始时会默认调用Tasks_Periodic,我们在这里设置任务
首先,我们需要按照edf的规范,设置周期,主要调用如下
rtems_rate_monotonic_create rtems_rate_monotonic_ident rtems_rate_monotonic_period
对于cbs而言,我们需要预设deadline和budget,并且如果任务超限,也就是cpu利用率大于1时,我们可以设置一个函数回调,如下
params.deadline = Periods[ argument ]; params.budget = Execution[ argument ]+1; rtems_cbs_create_server( ¶ms, &overrun_handler_task_4, &server_id )
如果我们需要在任务运行的时候,重设cbs的预算和截止时间,可以使用如下函数
rtems_cbs_set_parameters
至此,我们的测试程序如下
rtems_task Tasks_Periodic( rtems_task_argument argument ) { rtems_id rmid; rtems_id test_rmid; rtems_status_code status; bool scenario_done = 0; int start, stop, now; rtems_cbs_server_id server_id, tsid; rtems_cbs_parameters params, tparams; params.deadline = Periods[ argument ]; params.budget = Execution[ argument ]+1; if ( argument == 4 ) { if ( rtems_cbs_create_server( ¶ms, &overrun_handler_task_4, &server_id )) printf( "ERROR: CREATE SERVER FAILED\n" ); } else { if ( rtems_cbs_create_server( ¶ms, NULL, &server_id ) ) printf( "ERROR: CREATE SERVER FAILED\n" ); } if ( rtems_cbs_attach_thread( server_id, Task_id[ argument ] ) ) printf( "ERROR: ATTACH THREAD FAILED\n" ); if ( rtems_cbs_get_server_id( Task_id[ argument ], &tsid ) ) printf( "ERROR: GET SERVER ID FAILED\n" ); if ( tsid != server_id ) printf( "ERROR: SERVER ID MISMATCH\n" ); if ( rtems_cbs_get_parameters( server_id, &tparams ) ) printf( "ERROR: GET PARAMETERS FAILED\n" ); if ( params.deadline != tparams.deadline || params.budget != tparams.budget ) printf( "ERROR: PARAMETERS MISMATCH\n" ); status = rtems_rate_monotonic_create( argument, &rmid ); directive_failed( status, "rtems_rate_monotonic_create" ); put_name( Task_name[ argument ], FALSE ); printf( "- rtems_rate_monotonic_create id = 0x%08" PRIxrtems_id "\n", rmid ); status = rtems_rate_monotonic_ident( argument, &test_rmid ); directive_failed( status, "rtems_rate_monotonic_ident" ); put_name( Task_name[ argument ], FALSE ); printf( "- rtems_rate_monotonic_ident id = 0x%08" PRIxrtems_id "\n", test_rmid ); if ( rmid != test_rmid ) { printf( "RMID's DO NOT MATCH (0x%" PRIxrtems_id " and 0x%" PRIxrtems_id ")\n", rmid, test_rmid ); rtems_test_exit( 0 ); } put_name( Task_name[ argument ], FALSE ); printf( "- (0x%08" PRIxrtems_id ") period %" PRIu32 "\n", rmid, Periods[ argument ] ); status = rtems_task_wake_after( 2 + Phases[argument] ); directive_failed( status, "rtems_task_wake_after" ); while (FOREVER) { if (rtems_rate_monotonic_period(rmid, Periods[argument])==RTEMS_TIMEOUT) printf("P%" PRIdPTR " - Deadline miss\n", argument); start = rtems_clock_get_ticks_since_boot(); printf("P%" PRIdPTR "-S ticks:%d\n", argument, start); if ( start >= 2*HP_LENGTH ) break; /* stop */ /* Specific scenario for task 4: tries to exceed announced budget, the task priority has to be pulled down to background. */ now = rtems_clock_get_ticks_since_boot(); if ( !scenario_done && argument == 4 && now >= 200 ) { Violating_task[ argument ] = 1; scenario_done = 1; } /* Specific scenario for task 3: changes scheduling parameters. */ if ( !scenario_done && argument == 3 && now >= 250 ) { Periods[ argument ] = Periods[ argument ] * 2; Execution[ argument ] = Execution[ argument ] * 2; params.deadline = Periods[ argument ]; params.budget = Execution[ argument ]+1; if ( rtems_cbs_set_parameters( server_id, ¶ms) ) printf( "ERROR: SET PARAMETERS FAILED\n" ); if ( rtems_cbs_get_parameters( server_id, &tparams ) ) printf( "ERROR: GET PARAMETERS FAILED\n" ); if ( params.deadline != tparams.deadline || params.budget != tparams.budget ) printf( "ERROR: PARAMETERS MISMATCH\n" ); scenario_done = 1; } /* Specific scenario for task 2: late unblock after being blocked by itself, the task priority has to be pulled down to background. */ if ( !scenario_done && argument == 2 && now >= 500 ) { Violating_task[ argument ] = 1; scenario_done = 1; } if (argument == 2 && Violating_task[ argument ]) rtems_task_wake_after( 10 ); /* active computing */ while(FOREVER) { now = rtems_clock_get_ticks_since_boot(); if ( argument == 4 && !Violating_task[ argument ] && (now >= start + Execution[argument])) break; if ( argument != 4 && (now >= start + Execution[argument]) ) break; } stop = rtems_clock_get_ticks_since_boot(); printf("P%" PRIdPTR "-F ticks:%d\n", argument, stop); } /* delete period and SELF */ status = rtems_rate_monotonic_delete( rmid ); if ( status != RTEMS_SUCCESSFUL ) { printf("rtems_rate_monotonic_delete failed with status of %d.\n",status); rtems_test_exit( 0 ); } if ( rtems_cbs_cleanup() ) printf( "ERROR: CBS CLEANUP\n" ); fflush(stdout); TEST_END(); rtems_test_exit( 0 ); }
代码比较容易理解,下面运行查看日志
日志
*** TEST CBS SCHEDULER 3 *** PT1 - rtems_rate_monotonic_create id = 0x42010001 PT1 - rtems_rate_monotonic_ident id = 0x42010001 PT1 - (0x42010001) period 30 PT2 - rtems_rate_monotonic_create id = 0x42010002 PT2 - rtems_rate_monotonic_ident id = 0x42010002 PT2 - (0x42010002) period 40 PT3 - rtems_rate_monotonic_create id = 0x42010003 PT3 - rtems_rate_monotonic_ident id = 0x42010003 PT3 - (0x42010003) period 50 PT4 - rtems_rate_monotonic_create id = 0x42010004 PT4 - rtems_rate_monotonic_ident id = 0x42010004 PT4 - (0x42010004) period 70 AT5 AT6 P1-S ticks:2 P1-F ticks:12 P2-S ticks:12 P2-F ticks:22 P3-S ticks:22 P1-S ticks:32 P1-F ticks:42 P3-F ticks:42 P4-S ticks:42 P2-S ticks:52 P2-F ticks:62 P1-S ticks:62 P1-F ticks:72 P4-F ticks:72 P3-S ticks:72 P3-F ticks:82 AT6-S ticks:82 P6-F ticks:87 Killing task 6 AT5-S ticks:87 P1-S ticks:92 P1-F ticks:102 P2-S ticks:102 P2-F ticks:112 P4-S ticks:112 P1-S ticks:122 P1-F ticks:132 P3-S ticks:132 P3-F ticks:142 P2-S ticks:142 P2-F ticks:152 P4-F ticks:152 P1-S ticks:152 P1-F ticks:162 P2-S ticks:172 P2-F ticks:182 P1-S ticks:182 P1-F ticks:192 P3-S ticks:192 P3-F ticks:202 P4-S ticks:202 P1-S ticks:212 P1-F ticks:222 P4-F ticks:222 P2-S ticks:222 P2-F ticks:232 P3-S ticks:232 P3-F ticks:242 P1-S ticks:242 P1-F ticks:252 P2-S ticks:252 P2-F ticks:262 P4-S ticks:262 P1-S ticks:272 P1-F ticks:282 P3-S ticks:283 P3-F ticks:293 P2-S ticks:293 P2-F ticks:303 P1-S ticks:303 P1-F ticks:313 Signal overrun, fixing the task P4-F ticks:313 P5-F ticks:313 Killing task 5 P3-S ticks:322 P1-S ticks:332 P1-F ticks:342 P3-F ticks:342 P2-S ticks:342 P2-F ticks:352 P4-S ticks:352 P4-F ticks:362 P1-S ticks:362 P1-F ticks:372 P2-S ticks:372 P2-F ticks:382 P3-S ticks:382 P1-S ticks:392 P1-F ticks:402 P4-S ticks:402 P2-S ticks:412 P2-F ticks:422 P1-S ticks:422 P1-F ticks:432 P4-F ticks:432 P3-F ticks:432 P1-S ticks:452 P1-F ticks:462 P2-S ticks:462 P2-F ticks:472 P4-S ticks:472 P1-S ticks:482 P1-F ticks:492 P4-F ticks:492 P2-S ticks:492 P2-F ticks:502 P3-S ticks:502 P1-S ticks:512 P1-F ticks:522 P3-F ticks:522 P2-S ticks:532 P4-S ticks:532 P1-S ticks:542 P1-F ticks:552 P4-F ticks:552 P2-F ticks:552 P1-S ticks:572 P1-F ticks:582 P2-S ticks:582 P3-S ticks:582 P1-S ticks:602 P1-F ticks:612 P3-F ticks:612 P4-S ticks:612 P4-F ticks:622 P2-F ticks:622 P2 - Deadline miss P2-S ticks:622 P1-S ticks:632 P1-F ticks:642 P2-F ticks:642 P1-S ticks:662 P1-F ticks:672 P2-S ticks:672 P4-S ticks:672 P4-F ticks:682 P3-S ticks:682 P1-S ticks:692 P1-F ticks:702 P3-F ticks:702 P2-F ticks:702 P2 - Deadline miss P2-S ticks:702 P2-F ticks:712 P1-S ticks:722 P1-F ticks:732 P2-S ticks:742 P4-S ticks:742 P1-S ticks:752 P1-F ticks:762 P4-F ticks:762 P2-F ticks:762 P3-S ticks:772 P1-S ticks:782 P1-F ticks:792 P2-S ticks:792 P3-F ticks:792 P2-F ticks:802 P1-S ticks:812 P1-F ticks:822 P2-S ticks:822 P4-S ticks:822 P4-F ticks:832 P2-F ticks:832 P1-S ticks:842 *** END OF TEST CBS SCHEDULER 3 ***
我们简单分析一下
- 首先,任务按照1>2>3>4的优先级运行,并且每个任务都会在自己周期内完成,我们可以留意0-82 ticks
- 然后,我们知道任务如果紧张,那么任务4在不能在周期内完成,那么overrun回调就会调用,例如任务4上次完成是222,下次完成在313时,花费了91ticks,故看到日志Signal overrun, fixing the task
- 最后,当任务在周期内,一直得不到优先级执行,那么当deadline达到的时候,在周期函数内会返回timeout,代表任务未在deadline中执行完毕,故看到从p2的ticks 582开始,到ticks 622之间,我们发现p2的任务一直被p3,p1,p4占用,导致最后p2在deadline上无法正常运行。
总结
至此,我们演示清楚了cbs调度器的示例,希望可以加深大家对cbs调度算法的理解
根据之前的介绍,我们了解了edf调度算法,edf调度算法能够在理论上实现cpu利用率100%,也是单核性能最强的调度算法,因为edf算法基于deadline来控制调度的优先级,但是同样的,也是因为edf关于deadline的设计,我们使用这个算法的时候必须对任务的执行时间严格确定,也就是预设的周期内,任务是一定要完成的。如果deadline时间内,任务因为例如io问题导致延迟了,那么就会影响后面所有的任务的调度。从极端角度考虑,可能会导致deadline往后的任务,也就是优先级最低的任务,一直被饿死。
为了改善这个问题,cbs算法基于edf之上做了改进,本文介绍cbs算法
什么是cbs算法
cbs:constant bandwidth server。可以看到说明,cbs严格意义上只算一个服务,它用来改进edf算法,那么cbs支持哪些特性呢,如下:
- 为任务新增一个预算,此预算除以周期就是恒定带宽
- 如果任务的预算耗尽,但是任务没完成,则推迟deadline,降低任务优先级,让其他任务有机会运行
- 如果任务在周期内完成,则在下一个周期中,重新设置预算,重新运行,此预算就是其任务运行时间。
根据上面的描述,我们可以发现,cbs调度算法是一种更柔和的edf算法,如果我们的任务没办法确定固定的执行周期,也就是没办法保证任务在预设的周期内完成,那么edf算法就会像多米诺骨牌一样,一个任务延迟会导致其他所有的任务延迟。这种损坏是灾难性的。而cbs就不一样了,如果一个任务延迟,那么就会将其取消,然后降低其优先级。这样它就不会导致整个调度器上的就绪任务全部推迟。
rtems上的cbs调度算法
上面介绍清楚了cbs调度,它是edf的改进。接下来我们看一下rtems的cbs实现,如下
#define SCHEDULER_CBS_ENTRY_POINTS \ { \ _Scheduler_EDF_Initialize, /* initialize entry point */ \ _Scheduler_EDF_Schedule, /* schedule entry point */ \ _Scheduler_EDF_Yield, /* yield entry point */ \ _Scheduler_EDF_Block, /* block entry point */ \ _Scheduler_CBS_Unblock, /* unblock entry point */ \ _Scheduler_EDF_Update_priority, /* update priority entry point */ \ _Scheduler_EDF_Map_priority, /* map priority entry point */ \ _Scheduler_EDF_Unmap_priority, /* unmap priority entry point */ \ SCHEDULER_DEFAULT_SMP_OPERATIONS \ _Scheduler_CBS_Node_initialize, /* node initialize entry point */ \ _Scheduler_default_Node_destroy, /* node destroy entry point */ \ _Scheduler_CBS_Release_job, /* new period of task */ \ _Scheduler_CBS_Cancel_job, /* cancel period of task */ \ _Scheduler_default_Start_idle /* start idle entry point */ \ SCHEDULER_DEFAULT_SET_AFFINITY_OPERATION \ }
可以发现,cbs上对任务的初始化,恢复阻塞,新增任务和取消任务做了改进。 对于调度node的初始化,它新增了一个cbs的结构体,记录任务的deadline和budget,并提供一个当预算超时的函数回调。如下
typedef struct { /** Relative deadline of the server. */ time_t deadline; /** Budget (computation time) of the server. */ time_t budget; } Scheduler_CBS_Parameters; typedef struct { /** * Task id. * * @note: The current implementation of CBS handles only one task per server. */ rtems_id task_id; /** Server paramenters. */ Scheduler_CBS_Parameters parameters; /** Callback function invoked when a budget overrun occurs. */ Scheduler_CBS_Budget_overrun cbs_budget_overrun; /** * @brief Indicates if this CBS server is initialized. * * @see _Scheduler_CBS_Create_server() and _Scheduler_CBS_Destroy_server(). */ bool initialized; } Scheduler_CBS_Server;
对于任务周期的开始,cbs相比于edf仅多做两件事
- 给任务节点设置一个预算
- 将任务的周期设置为deadline优先级节点
对于任务的取消,那么直接取消deadline的优先级节点即可
对于任务的解除阻塞,此实现比较重要,其函数如下
void _Scheduler_CBS_Unblock( const Scheduler_Control *scheduler, Thread_Control *the_thread, Scheduler_Node *node ) { Scheduler_CBS_Node *the_node; Scheduler_CBS_Server *serv_info; Priority_Control priority; the_node = _Scheduler_CBS_Node_downcast( node ); serv_info = the_node->cbs_server; priority = _Scheduler_Node_get_priority( &the_node->Base.Base ); priority = SCHEDULER_PRIORITY_PURIFY( priority ); /* * Late unblock rule for deadline-driven tasks. The remaining time to * deadline must be sufficient to serve the remaining computation time * without increased utilization of this task. It might cause a deadline * miss of another task. */ if ( serv_info != NULL && ( priority & SCHEDULER_EDF_PRIO_MSB ) == 0 ) { time_t deadline = serv_info->parameters.deadline; time_t budget = serv_info->parameters.budget; uint32_t deadline_left = the_thread->CPU_budget.available; Priority_Control budget_left = priority - _Watchdog_Ticks_since_boot; if ( deadline * budget_left > budget * deadline_left ) { Thread_queue_Context queue_context; /* Put late unblocked task to background until the end of period. */ _Thread_queue_Context_clear_priority_updates( &queue_context ); _Scheduler_CBS_Cancel_job( scheduler, the_thread, the_node->deadline_node, &queue_context ); } } _Scheduler_EDF_Unblock( scheduler, the_thread, &the_node->Base.Base ); }
可以看到,当任务从其他阻塞状态恢复到非阻塞状态,也就是加入就绪列表的时候,它会计算四个值
- deadline
- budget
- 剩余的deadline
- 剩余的budget
关于deadline和预算我们知道就是任务的周期和任务的执行事件,对于剩余的deadline和budget,其实就是任务实际运行时:
- 相较于设置的deadline还剩余的时间
- 相较于设置的budget还剩余的预算
那么关键的就是如下判断
if ( deadline * budget_left > budget * deadline_left ) {
我们看到不等式如下
deadline * budget_left > budget * deadline_left
它可以替换成如下
budget_left/deadline_left > budget/deadline
那么其含义就清楚了,那就是剩余的预算除以剩余的deadline的比重如果大于预期的预算除以deadline。那么就需要重设优先级,取消任务了。
再把意思转换一下,就是:
- 如果budget_left占比不变,则deadline_left占比太小,也就是剩余的deadline时间不够,也就是当前任务时间不够宽裕
- 如果deadline_left占比不变,则budget_left占比太大,也就是剩余的预算太大
对于上述的1好理解,如果deadline比重太小了,任务可能就不可控了。那么对于2怎么理解呢?
我们知道,如果任务正常执行,不可能存在剩余的预算除以剩余的deadline的占比反而大。但是在计算机领域,我们存在IO,IO是阻塞的,在IO期间,预算的时间是不被减掉的,也就是说进入unblock的预算时间值,实际上是进入IO之前的预算时间值。那么IO的时间实际上还没有计算进去。此时如果budget_left占比太大,说明任务有一定的风险导致不可控。这就理解清楚情况2了。
那么_Scheduler_CBS_Unblock的逻辑就是,如果剩余的任务占比要比预设的任务占比大,那么调度可能失控,此时将其任务从就绪队列删除,降低其优先级
总结
至此,我们基于edf介绍了cbs调度算法,它是edf算法的改进,当意外出现的时候,它会对失控的任务降低优先级,从而不会导致整个调度失控。
接下来,我会通过示例程序演示此调度器。
